
深圳市東么川伺服控制技術有限公司
電話:0755-29030191
郵箱:983847136@qq.com
地址:深圳市龍華區東環一路天匯大廈D棟306房
伺服電機選型參數參考:轉速、扭矩、慣量
發布時間:2021-04-25 07:13:23

圖1:常見機械機構
伺服電機的選型原則
·連續工作時的電機轉速<電機額定速度
·連續工作扭矩<伺服電機額定扭矩
·瞬時最大扭矩<伺服電機最大扭矩(加速時)
·慣量比:根據設備動態性能要求,確定合適的慣量比
綜上可得出結論,伺服電機的三個選型參數是:轉速、扭矩、慣量。
注意,沒有將功率作為伺服電機的核心選型參數。有些伺服電機廠家的電機系列中,同樣功率的電機分小,中大慣量。
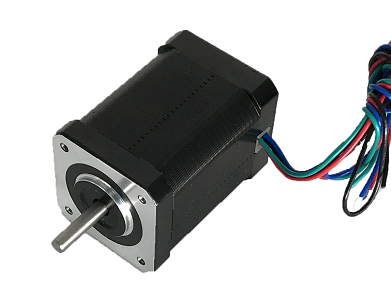
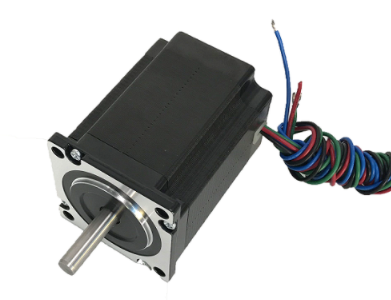
如下圖所示,兩個伺服電機功率相同,其中左圖為低慣量高速電機,右圖為高慣量低速電機。低慣量電機適用于高動態響應、低扭矩場合,高慣量電機適用于高扭矩輸出、轉速較低的場合。顯然功率相同的兩個電機,其應用特點不一樣。

大家可以想象博爾特和泰森的對比,兩人體重可能差別不大,但其個人特點卻大相徑庭。伺服電機同理。另:從機械設計的角度,伺服電機是通過扭矩驅動機械機構實現運轉的。因此通過扭矩選擇伺服電機比通過功率選型更準確。功率可作為一個參考選型參數。
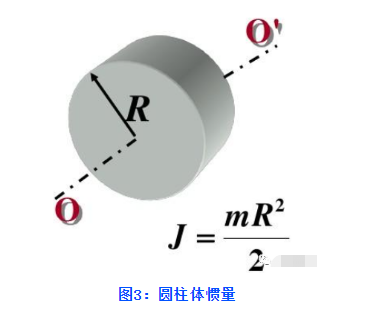
轉動慣量和扭矩
轉動慣量是剛體轉動慣性的量度,由剛體自身的結構(轉軸、質量、形狀)決定,與外界因素無關,是剛體的固有性質。
力矩
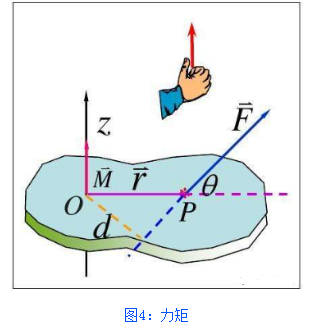
如圖4所示
T=F*r*sinθ=Fd (1)
T: 力矩
F:作用力
d: 力臂
即:力矩大小等于力的大小乘以參考點到力的作用線的距離。
力矩是矢量,有方向性。
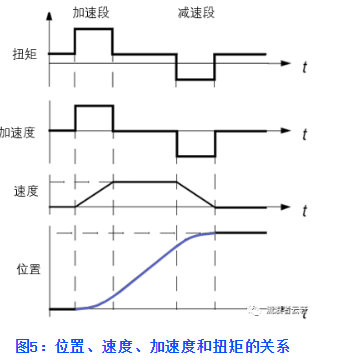
電機扭矩在設備啟動時,產生加速度,在恒速運動時,克服系統的阻力矩,在設備停止時,產生減速度,使設備快速停止。位置、速度、加速度、扭矩的關系如圖5所示:
力矩和轉動慣量的關系
由公式(3)可見,扭矩與轉動慣量和角加速度成正比。電機輸出扭矩一定時,慣量和角加速度成反比。
在扭矩輸出一定時,慣量越大,其可獲得的角加速度越小,即:機械機構的動態性能越差。反之,慣量越小,其可獲得的角加速度越大,機械機構的動態性能越好。
當伺服電機驅動負載時,公式(3)中的T為伺服電機的輸出扭矩,θ為電機軸可獲得的角加速度,J為伺服電機的轉子慣量和負載映射慣量之和。即:
J=JM+JL (4)
J: 回轉系統的慣量
JM:電機定子慣量
JL:負載映射到電機軸上的慣量
比如,機械機構通過n=3的減速機連接到電機軸上,通過計算得出減速機前端機械機構的總慣量JZ,設JZ映射到電機軸上的慣量為JL,則:
JL=JZ/n2=JZ/9 (5)
即:負載的映射慣量與減速比的平方成反比。
在機械設計時,根據公式(5),要先算出JZ,然后根據減速比n計算出負載機械機構映射到電機軸上的映射慣量。
有時,負載機械機構有多重負載,則負載機械機構的總慣量為多重負載的慣量之和。
慣量比
負載映射慣量與電機轉子慣量的比值即慣量比。
機械機構設計完成后,要合理選擇伺服電機,把慣量比限制在一定的范圍內,使負載映射慣量與電機轉子慣量相匹配。慣量匹配需要根據設備的動態特性、精度要求、負載變化范圍等因素綜合設計。
-
高動態設備的慣量比一般小于3,比如機床、金屬加工設備等。 -
普通設備慣量比,一般小于7,如普通焊接機、包裝設備等。 -
低要求設備,一般小于10,如皮帶傳輸、重載變位機等。
可結合選擇減速比進行慣量匹配。如前文所述,負載在電機軸上的映射慣量與減速比的平方成反比。增大減速比,可以顯著減小負載映射到電機軸上的慣量,即減小伺服電機的負載。此時,在負載機械慣量不變的情況下,選擇大減速比的減速機,可對應選擇容量較小的伺服電機,降低綜合成本。
但,增大減速比會降低負載側的轉速,因為負載側轉速與減速比成反比。減速比要保證減速后的速度能滿足負載側的最大速度要求。
進行慣量匹配時,還需考慮空載和滿載情況,設備空載和滿載運行時,其負載慣量是不一樣的,慣量比也不同。要保證在滿載的情況下,慣量比也在合理的范圍之內。
慣量匹配時,要綜合考慮減速比,轉速要求,空載和滿載等多種情況,兼顧性能和成本。
其他考慮因素
伺服電機選型時,還要考慮電機法蘭、編碼器類型、編碼器精度、抱閘等因素。
電機法蘭:涉及電機與機械接口的匹配
編碼器類型:主要分增量編碼器和絕對值編碼器,增量編碼器每次上電均需回零,絕對值編碼器又分單圈和多圈絕對值編碼器,需視具體應用確定是否需回零,一般多圈絕對值編碼器不需回零。
編碼器精度:現在伺服電機的編碼器精度做得都比較高,可滿足大部分機械對編碼器精度的要求。對一些高精密的設備,可考慮選分辨率較高的編碼器。
抱閘:驅動負重的垂直軸一般需選擇帶抱閘的伺服電機。
伺服驅動器和其他附件選型
根據伺服電機的額定電流選擇伺服驅動器,一般選伺服驅動器的額定電流等于或稍大于伺服電機的額定電流。驅動器的編碼器輸入接口需與伺服電機的編碼器信號輸出格式相匹配。有些伺服品牌,其伺服驅動器與伺服電機已成對匹配,選型非常方便。
根據伺服電機和驅動器選擇配套的電源線和編碼器線。有時為節省成本,也可自己制作。
總結
伺服電機的選型主要按轉速、扭矩和慣量選型。功率可作為選型的一個參考參數。
參數選型比較簡單,直接按伺服電機規格表選型即可。
設計選型需考慮機械機構、負載變化、速度、加速度、精度、慣量匹配等要求,還需考慮機械加工精度,裝配精度,傳動效率、摩擦力,選型裕量、經濟性等,還需考慮法蘭、編碼器、抱閘等因素。并根據伺服電機進行相應伺服驅動器的選型。這部分工作一般由機械設計人員完成。
- 上一篇:應用步進電機,設計一個簡單的自動剪線裝置
- 下一篇:介紹交流伺服驅動器的控制回路
產品推薦:兩相步進電機



產品推薦:無刷電機








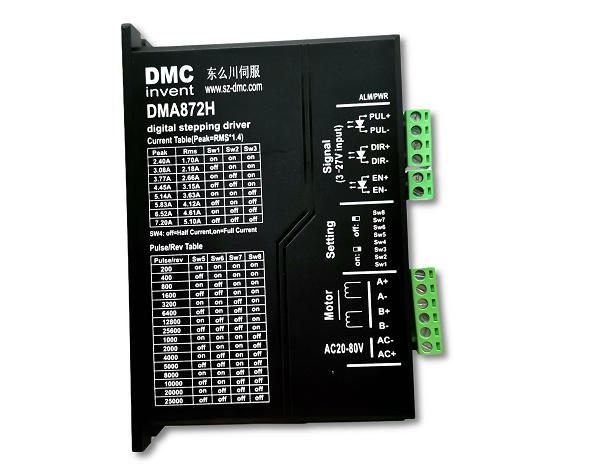
產品推薦:兩相步進驅動器






產品推薦:直流無刷驅動器






 地址 ADDRESS
地址 ADDRESS