- >>兩相步進(jìn)電機(jī)
- >>無(wú)刷電機(jī)
- >>三相步進(jìn)電機(jī)
- >>行星減速機(jī)
- >>直流無(wú)刷電機(jī)
- >>兩相步進(jìn)驅(qū)動(dòng)器
- >>直流無(wú)刷驅(qū)動(dòng)器
- >>三相步進(jìn)驅(qū)動(dòng)器
- >>直流無(wú)刷伺服驅(qū)動(dòng)器
- >>韓國(guó)GGM電機(jī)減速機(jī)

深圳市東么川伺服控制技術(shù)有限公司
電話:0755-29030191
郵箱:983847136@qq.com
地址:深圳市龍華區(qū)東環(huán)一路天匯大廈D棟306房
介紹交流伺服驅(qū)動(dòng)器的控制回路
發(fā)布時(shí)間:2021-04-25 07:41:24
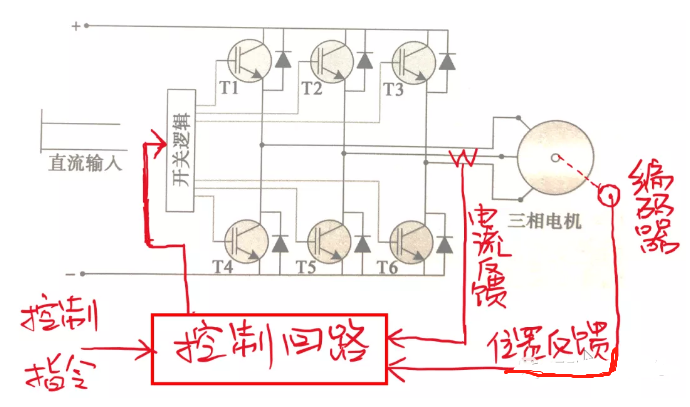
控制回路與主電路的關(guān)系
如前文交流伺服驅(qū)動(dòng)器的主回路簡(jiǎn)介所述,交流伺服驅(qū)動(dòng)器的控制電路通過(guò)控制逆變器的開(kāi)關(guān)邏輯,實(shí)現(xiàn)對(duì)逆變器輸出電流和電壓的精確控制,從而實(shí)現(xiàn)對(duì)伺服電機(jī)快速、精確及穩(wěn)定的控制。
伺服控制回路接受控制指令并接受伺服電機(jī)的電流反饋和位置反饋信號(hào),計(jì)算生成控制伺服逆變器的相電壓指令(開(kāi)關(guān)邏輯),用于控制伺服驅(qū)動(dòng)器的輸出。
圖1:控制回路與主回路的關(guān)系
控制電路的主要控制策略
運(yùn)動(dòng)控制需要精確的扭矩、速度和位置控制。伺服驅(qū)動(dòng)器一般常見(jiàn)的有電流環(huán)、速度環(huán)和位置環(huán)三個(gè)閉環(huán)。電流環(huán)是伺服驅(qū)動(dòng)器的最內(nèi)環(huán),也是必須的控制環(huán)。電流環(huán)外,伺服的控制回路有3種常見(jiàn)的控制策略。
1. 級(jí)聯(lián)的速度環(huán)和位置環(huán),其概念如圖2所示:
圖2:級(jí)聯(lián)的速度環(huán)和位置環(huán)

這種結(jié)構(gòu)是最常用的,位置環(huán)內(nèi)嵌一個(gè)速度環(huán),速度環(huán)內(nèi)嵌電流環(huán)。這三個(gè)環(huán)分別用于控制伺服的位置、速度和扭矩。
2. 單環(huán)PID位置控制,其概念如圖3所示:
圖3:?jiǎn)苇h(huán)PID位置控制
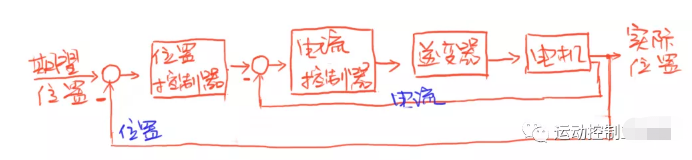
此控制策略與級(jí)聯(lián)的速度環(huán)和位置環(huán)控制策略相比,沒(méi)有速度環(huán),故不能做速度控制,只能做位置和扭矩控制。
圖4:帶前饋控制的級(jí)聯(lián)閉環(huán)
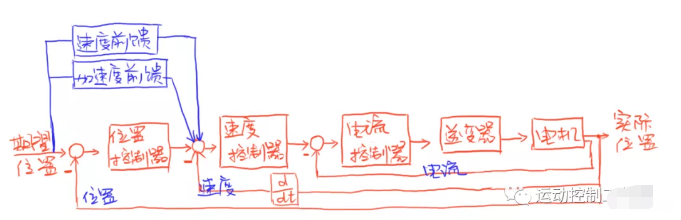
由上圖可見(jiàn),這種控制策略在傳統(tǒng)級(jí)聯(lián)的速度環(huán)和位置環(huán)之外,加了速度前饋和加速度前饋。此前饋在速度環(huán)和位置環(huán)之外,因而不會(huì)導(dǎo)致系統(tǒng)的不穩(wěn)定。
伺服控制欲保證其快速性、穩(wěn)定性和準(zhǔn)確性,一般要求系統(tǒng)具有高增益。可增益過(guò)高容易引起不穩(wěn)定,特別是PID控制器中的積分增益。一般在定位停止時(shí)才投入積分器,以最終消除跟蹤誤差。而在運(yùn)動(dòng)過(guò)程中誤差的消除,就要借助速度前饋和加速度前饋。
速度前饋:輸入速度曲線直接反饋給速度環(huán),當(dāng)速度發(fā)生突變時(shí),系統(tǒng)迅速響應(yīng),從而消除跟蹤誤差。如速度前饋增益設(shè)置的太高,在速度曲線的加/減速區(qū)間會(huì)產(chǎn)生誤差尖峰。
加速度前饋:通過(guò)加一個(gè)加速度前饋,可以解決速度前饋增益太高引起的超調(diào),即誤差尖峰問(wèn)題,使整個(gè)系統(tǒng)有快速響應(yīng)能力及強(qiáng)擾動(dòng)抑制能力。
當(dāng)前先進(jìn)的伺服驅(qū)動(dòng)器都有速度和加速度前饋功能!
控制電路三個(gè)環(huán)的簡(jiǎn)單介紹
位置環(huán)接受外部指令,并輸出速度指令,作為速度環(huán)的輸入。速度環(huán)輸出電流指令,作為電流環(huán)的輸入。所謂伺服的整定,即是對(duì)伺服三個(gè)閉環(huán)的PID整定。
電流環(huán):電流環(huán)是伺服的最內(nèi)環(huán),由電流環(huán)向電機(jī)的定子注入電流,實(shí)現(xiàn)電機(jī)的加減速控制。電流環(huán)的輸入是速度環(huán)的輸出,以及實(shí)時(shí)的電流反饋信號(hào)。電流環(huán)必須被首先整定,且要整定良好。因?yàn)殡娏鳝h(huán)就像大樓的地基一樣。電流環(huán)性能差,是無(wú)法通過(guò)速度或位置環(huán)的整定彌補(bǔ)的。
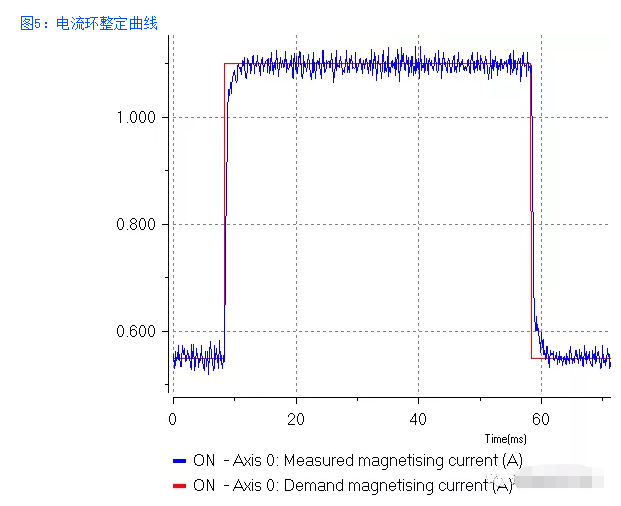
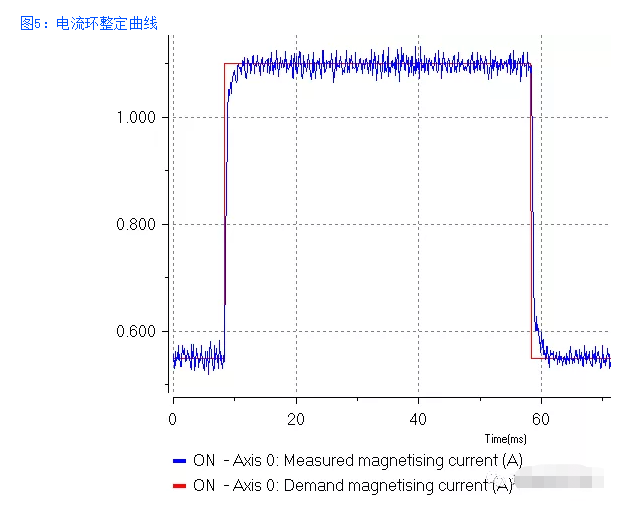
常用階躍信號(hào)對(duì)電流環(huán)進(jìn)行整定。一般情況下,階躍響應(yīng)是系統(tǒng)可能遇到的最糟糕的情況。位置外環(huán)產(chǎn)生給速度環(huán),以及速度環(huán)產(chǎn)生給電流環(huán)的指令都是比階躍信號(hào)平滑得多的指令。因此,如果系統(tǒng)能對(duì)階躍信號(hào)有一個(gè)滿意的響應(yīng),它在更平滑的運(yùn)行條件下,響應(yīng)會(huì)更好。
圖5:電流環(huán)整定曲線
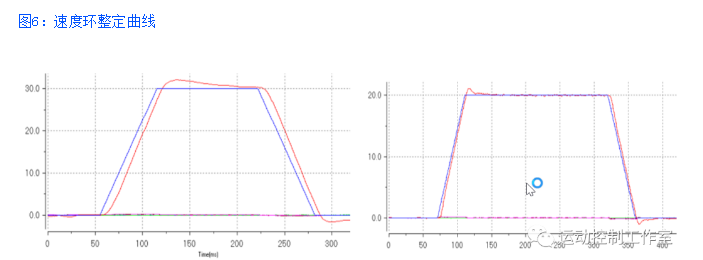
速度環(huán):速度環(huán)的輸入是位置環(huán)的輸出,以及電機(jī)的反饋速度。速度環(huán)的輸出是一個(gè)電流指令給到電流環(huán)。速度環(huán)的性能,主要考察速度跟隨情況。如下圖左圖,增益較小,跟隨誤差較大。右圖跟隨誤差要小得多。
圖6:速度環(huán)整定曲線
速度環(huán)整定一般采用PI策略,比例增益增大系統(tǒng)阻尼(抑制過(guò)沖), 積分增益提升系統(tǒng)響應(yīng)。一般要求加減速時(shí),速度過(guò)沖小,速度跟隨快速,且勻速運(yùn)動(dòng)或靜止時(shí)無(wú)抖動(dòng)。
注:有的伺服驅(qū)動(dòng)器,當(dāng)采用單環(huán)PID位置控制策略時(shí),是沒(méi)有速度環(huán)的。一般認(rèn)為這種控制方式可提升位置控制的控制精度。
位置環(huán):位置環(huán)主要考察實(shí)際位置與給定位置之間的跟隨誤差,尤其是加減速階段,要求跟隨誤差幅值小,且能快速降為0。
圖7:位置環(huán)整定曲線
如上圖,粉紅色曲線為跟隨誤差,粉紅色坐標(biāo)為其縱坐標(biāo)。其加減速階段,最大跟隨誤差為0.008個(gè)用戶單位,跟隨誤差穩(wěn)定約需180ms
控制回路的幾個(gè)頻率參數(shù)
Profiler Rate: 控制回路接收的外部指令為期望位置,或Setposition. SetPosition由Profiler(又稱軌跡規(guī)劃器,或輪廓規(guī)劃器)生成,直接給到位置環(huán)。Profiler以一定的頻率更新給定的SetPosition指令,此頻率為Profiler Rate。如由上位PLC通過(guò)EtherCAT總線控制伺服,總線周期為2ms時(shí),其Profiler Rate為500KHz。
伺服環(huán)刷新頻率:三個(gè)環(huán)都有一個(gè)反饋信號(hào)采樣周期。一般最內(nèi)環(huán)的采樣周期最短,即刷新頻率最大。對(duì)電流環(huán)而言是對(duì)霍爾元件或電流互感器采樣,對(duì)速度和位置環(huán)而言,是對(duì)編碼器采樣。速度環(huán)的反饋信號(hào),可由實(shí)時(shí)反饋位置的微分得到。三環(huán)的刷新頻率一般由伺服驅(qū)動(dòng)器默認(rèn)設(shè)置。有的也可以進(jìn)行更改。提升采樣頻率可提升驅(qū)動(dòng)器性能,但會(huì)增加處理芯片的負(fù)擔(dān)。
PWM開(kāi)關(guān)頻率:對(duì)應(yīng)逆變器中,IGBT的開(kāi)關(guān)頻率。提升PWM開(kāi)關(guān)頻率有助于降低噪音,提升電流環(huán)性能。但開(kāi)關(guān)元件發(fā)熱上升,最大輸出電流會(huì)有所下降。
總結(jié)
本文簡(jiǎn)單介紹了伺服驅(qū)動(dòng)器的控制電路。首先講述控制回路與主回路之間的關(guān)系,然后是伺服驅(qū)動(dòng)器常用的控制策略,最后簡(jiǎn)述控制回路的三個(gè)閉環(huán),以及與這幾個(gè)閉環(huán)對(duì)應(yīng)的幾個(gè)頻率參數(shù)。
伺服控制是很復(fù)雜的技術(shù),僅PWM控制就有多種算法和策略。PID整定也是非常復(fù)雜的算法。本文僅從概念上,對(duì)交流伺服驅(qū)動(dòng)器的控制電路做一個(gè)簡(jiǎn)單介紹。
產(chǎn)品推薦:兩相步進(jìn)電機(jī)



產(chǎn)品推薦:無(wú)刷電機(jī)








產(chǎn)品推薦:兩相步進(jìn)驅(qū)動(dòng)器






產(chǎn)品推薦:直流無(wú)刷驅(qū)動(dòng)器






 地址 ADDRESS
地址 ADDRESS