新聞中心
產品中心
聯系我們

深圳市東么川伺服控制技術有限公司
電話:0755-29030191
郵箱:983847136@qq.com
地址:深圳市龍華區東環一路天匯大廈D棟306房
三相HB步進電機工作原理及接線圖
發布時間:2020-12-05 08:05:32
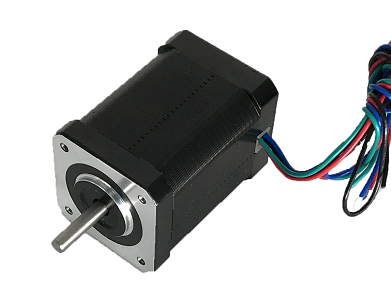
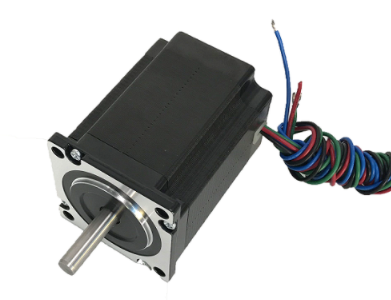
三相HB式步進電機的外觀與二相電機幾乎完全相同。三相步進電機的經典參數:基本步進角為 1.2°,機座尺寸為□ 42 或□ 56。但是, □ 35、□ 50 和□ 60,以及 φ86 也是很常見的尺寸。也有一些三相步進電機的基本步進角為常規參數的一半,即 0.6°。此外,基本 步進角遠大于普通電機,達到 3.75°的電機也在實際生產中有一定的應用 。由基本步進角的表達式可知,在轉子的小齒數保持不變的前提下, 增加相數即可減小基本步進角。這里,相數增加到 3,基本步進角減小為 1.2°。
圖 1 是基本步進角為 1.2°的三相步進電機內部結構示例。
● 轉 子 轉子的小齒數為 50,與二相電機相同。
● 定 子 定子上以 30°間隔設置了 12 個主極,主極的端面設置有小齒——齒夾角和轉子 大約相同,為 7.2°。圖 9.6 所示結構的每個主極上有 4 個齒。
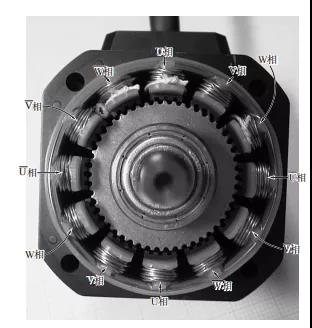
圖1
這里將上、下、左、右互相間隔 90°的 4 個主極稱為 U 相,在 2 個方向上分別 與它們間隔 30°的稱為 V 相和 W 相,線圈就按照這三相來布置。各相中相對的兩極 的磁性相同,間隔 90°的兩極的磁性相反,定子的主極相位順序如下:U → V → W → U → V → W → U → V → W → U → V → W 主極之間的 30°夾角與小齒之間的 7.2°齒夾角之間的關系可以表示為 30 = 7.2×4 + 1.2 = 7.2× 4 + 16 (9.3) 因此,相鄰主極之間的相位差為 1/6 夾角(電氣角 60°,機械角 1.2°)。
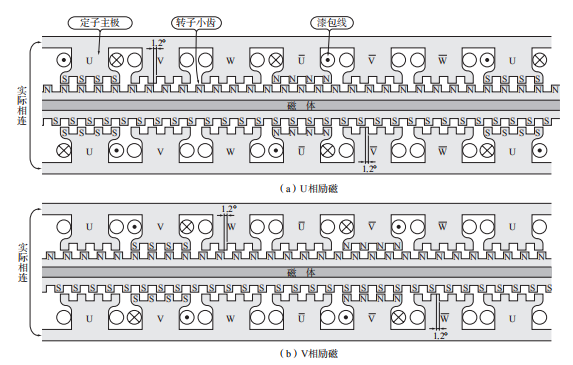
工作原理
三相電機的工作原理如圖 2 所示。相對于二相的 1/4 齒夾角的相位差,三相電 機中相鄰主極之間的相位差是 1/6 齒夾角(1.2°)。在圖 2 中,首先 U 相勵磁,主極 U 磁化為 S 極,主極 U 磁化為 N 極,轉子的 N 極小齒受 U 主極吸引,S 極小齒受 U 主極吸引,轉子轉動到圖 2(a)所示的位 置停止。在這種情況下,V 相和 V 相的小齒與轉子的小齒錯開 1/6 夾角,W 相和 W 相的小齒則與轉子小齒錯開 2×1/6 夾角。此后,與二相電機一樣,將勵磁電流從 U 相切換至 V 相,則轉子向右方轉動 1/6 夾角(1.2°),并在圖 2(b)所示的位置停止。因此,三相步進電機的勵磁相位按如下順序切換,就可以以 1.2°步進角持續 旋轉:U → V → W → U → V → W → U…
接線方式
圖 3(a)所示的是三相繞組(U、V、W)采用 Y 形連接(星形連接)的方式。這種方式需要引出 3 個接線端子,需要采用 6 個晶體管的三相橋式電路驅動。但是,這種方式只能進行二相激勵。如果你想分別單獨控制各相的電流,則需要 如圖 3(b)所示從每相引出 2 個端子,且需要 3 組全橋電路來驅動。
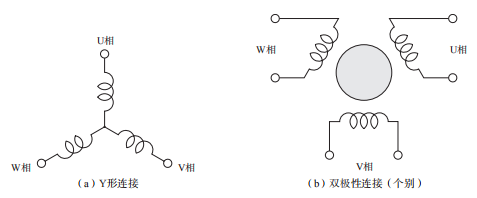
圖3
圖 1 是基本步進角為 1.2°的三相步進電機內部結構示例。
● 轉 子 轉子的小齒數為 50,與二相電機相同。
● 定 子 定子上以 30°間隔設置了 12 個主極,主極的端面設置有小齒——齒夾角和轉子 大約相同,為 7.2°。圖 9.6 所示結構的每個主極上有 4 個齒。
圖1
這里將上、下、左、右互相間隔 90°的 4 個主極稱為 U 相,在 2 個方向上分別 與它們間隔 30°的稱為 V 相和 W 相,線圈就按照這三相來布置。各相中相對的兩極 的磁性相同,間隔 90°的兩極的磁性相反,定子的主極相位順序如下:U → V → W → U → V → W → U → V → W → U → V → W 主極之間的 30°夾角與小齒之間的 7.2°齒夾角之間的關系可以表示為 30 = 7.2×4 + 1.2 = 7.2× 4 + 16 (9.3) 因此,相鄰主極之間的相位差為 1/6 夾角(電氣角 60°,機械角 1.2°)。
工作原理
三相電機的工作原理如圖 2 所示。相對于二相的 1/4 齒夾角的相位差,三相電 機中相鄰主極之間的相位差是 1/6 齒夾角(1.2°)。在圖 2 中,首先 U 相勵磁,主極 U 磁化為 S 極,主極 U 磁化為 N 極,轉子的 N 極小齒受 U 主極吸引,S 極小齒受 U 主極吸引,轉子轉動到圖 2(a)所示的位 置停止。在這種情況下,V 相和 V 相的小齒與轉子的小齒錯開 1/6 夾角,W 相和 W 相的小齒則與轉子小齒錯開 2×1/6 夾角。此后,與二相電機一樣,將勵磁電流從 U 相切換至 V 相,則轉子向右方轉動 1/6 夾角(1.2°),并在圖 2(b)所示的位置停止。因此,三相步進電機的勵磁相位按如下順序切換,就可以以 1.2°步進角持續 旋轉:U → V → W → U → V → W → U…
接線方式
圖 3(a)所示的是三相繞組(U、V、W)采用 Y 形連接(星形連接)的方式。這種方式需要引出 3 個接線端子,需要采用 6 個晶體管的三相橋式電路驅動。但是,這種方式只能進行二相激勵。如果你想分別單獨控制各相的電流,則需要 如圖 3(b)所示從每相引出 2 個端子,且需要 3 組全橋電路來驅動。
圖3
- 上一篇:干貨——步進電機的三種類型詳細介紹
- 下一篇:步進電機噪音(噪聲)大,降噪技術來幫忙
產品推薦:兩相步進電機



產品推薦:無刷電機








產品推薦:兩相步進驅動器






產品推薦:直流無刷驅動器






 地址 ADDRESS
地址 ADDRESS