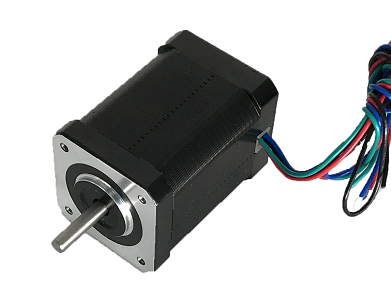
- >>兩相步進(jìn)電機(jī)
- >>無刷電機(jī)
- >>三相步進(jìn)電機(jī)
- >>行星減速機(jī)
- >>直流無刷電機(jī)
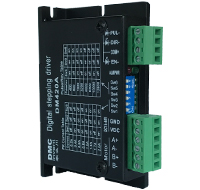
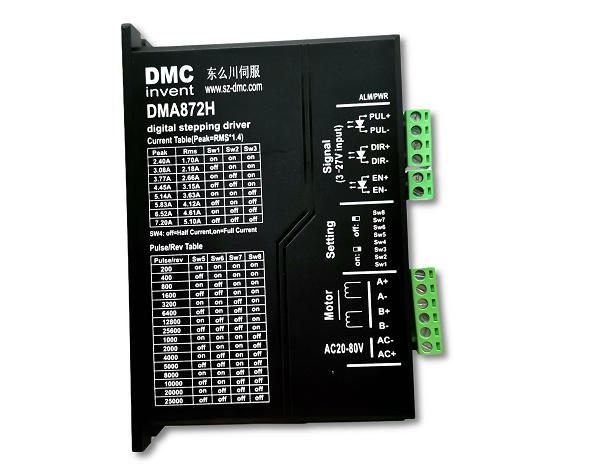
- >>兩相步進(jìn)驅(qū)動器
- >>直流無刷驅(qū)動器
- >>三相步進(jìn)驅(qū)動器
- >>直流無刷伺服驅(qū)動器
- >>韓國GGM電機(jī)減速機(jī)

深圳市東么川伺服控制技術(shù)有限公司
電話:0755-29030191
郵箱:983847136@qq.com
地址:深圳市龍華區(qū)東環(huán)一路天匯大廈D棟306房
電機(jī)負(fù)載計算公式-電機(jī)負(fù)載計算方法實例
發(fā)布時間:2020-12-02 08:56:05
1.確認(rèn)負(fù)載機(jī)構(gòu)的運動條件要求,包括加減速度,運動速度,機(jī)構(gòu)的重量,機(jī)構(gòu)的運動方式。
2.負(fù)載之慣量計算
直線運動負(fù)載慣量計算式:
JL:負(fù)載慣量,計算至電機(jī)輸出軸(KG*CM²)
V:負(fù)載直線運動速度(mm/min)
△S:電機(jī)轉(zhuǎn)一圈,負(fù)載的移動量(mm)
W:負(fù)載重量(KG)
N:電機(jī)轉(zhuǎn)速(r/min)
3.由負(fù)載慣量與電機(jī)慣量的比例原則,選出適當(dāng)?shù)碾姍C(jī)規(guī)格。
4.將選定的電機(jī)慣量合并負(fù)載慣量,計算出加速轉(zhuǎn)矩及減速轉(zhuǎn)矩。
JL:負(fù)載慣量,計算至電機(jī)運輸出軸(KG*CM²)
Jm:電機(jī)慣量(KG*CM²)
N:電機(jī)轉(zhuǎn)速(r/min)rpm
Tpsa:加速時間(s)
Tpsd:減速時間(s)
5.依據(jù)負(fù)載重量,安裝方式,摩擦系數(shù),電機(jī)效率,計算出等速韻達(dá)時的負(fù)荷轉(zhuǎn)矩。

F:直線韻達(dá)是的軸向力
F=Fc+μ×(W×g+Fo)
TL:負(fù)荷轉(zhuǎn)矩(N.m)
Fc:軸方向的外加作用力(N)
Fo:負(fù)載對SR模組的外加正壓力(N)
W:負(fù)載重量(含滑臺)Kg
μ:摩擦系數(shù)
η:機(jī)器效率
V:負(fù)載直線韻達(dá)速遞(mm/min)
N:電機(jī)轉(zhuǎn)速(r/min)
g:重力加速度(9.8m/s²)
△S:電機(jī)轉(zhuǎn)一圈,負(fù)載的移動量(mm)
6.選定電機(jī)最大輸出轉(zhuǎn)矩,須大于加速轉(zhuǎn)矩和負(fù)荷轉(zhuǎn)矩相加的和:如果不符合條件,必須選用其它型號,再計算驗證至符合要求為止。
7.依據(jù)負(fù)荷轉(zhuǎn)矩,加速轉(zhuǎn)矩,減速轉(zhuǎn)矩及保持轉(zhuǎn)矩,求出電機(jī)連續(xù)實效轉(zhuǎn)矩。
Tpsa:加速時間(s) tc:等速時間
Tpsd:減速時間(s) th:停止時間
Tf:過期時間 Ta:加速轉(zhuǎn)矩
TL:負(fù)荷轉(zhuǎn)矩 Td:減速轉(zhuǎn)矩
TLH:保持轉(zhuǎn)矩(水平運動時,TLH=0)
8.選定電機(jī)的額定輸出轉(zhuǎn)矩必須大于連續(xù)實效轉(zhuǎn)矩,如果不符合條件,必須選用其它型號,在計算驗證至符合要求為止。
安裝
滾珠絲杠螺桿式若確定用途為垂直使用方向(Z軸)請注意,垂直安裝屬于特殊使用狀態(tài),承受負(fù)荷請在表列最大可搬重量(直立)范圍內(nèi)使用,除此之外,皮帶式不建議垂直方向使用。
注意:圍放置負(fù)載滑料,垂直安裝時,采用電機(jī)帶剎車。
產(chǎn)品推薦:兩相步進(jìn)電機(jī)


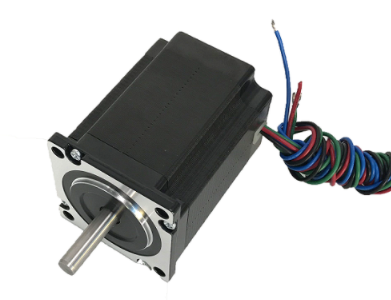

產(chǎn)品推薦:無刷電機(jī)








產(chǎn)品推薦:兩相步進(jìn)驅(qū)動器






產(chǎn)品推薦:直流無刷驅(qū)動器






 地址 ADDRESS
地址 ADDRESS