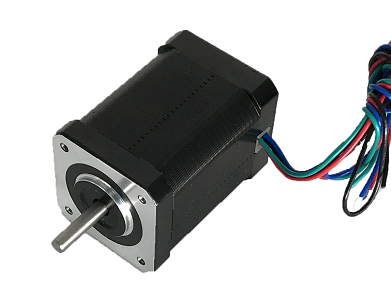
- >>兩相步進(jìn)電機(jī)
- >>無刷電機(jī)
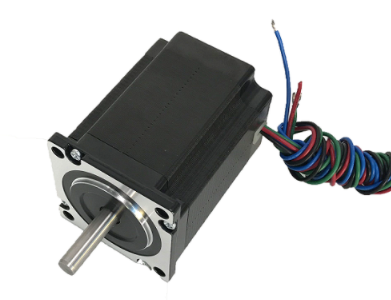
- >>三相步進(jìn)電機(jī)
- >>行星減速機(jī)
- >>直流無刷電機(jī)
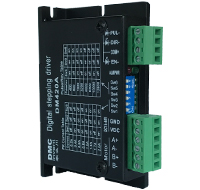
- >>兩相步進(jìn)驅(qū)動(dòng)器
- >>直流無刷驅(qū)動(dòng)器
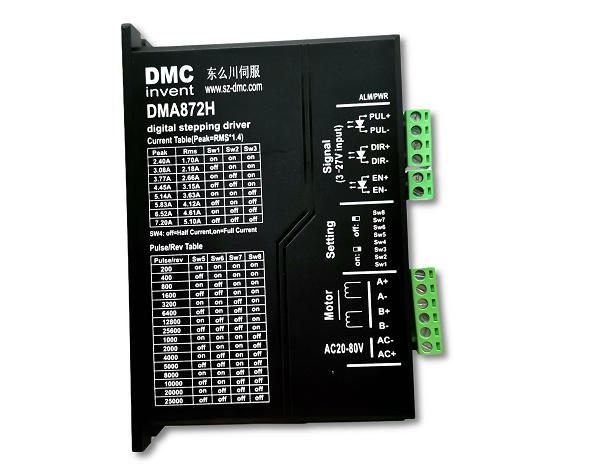
- >>三相步進(jìn)驅(qū)動(dòng)器
- >>直流無刷伺服驅(qū)動(dòng)器
- >>韓國(guó)GGM電機(jī)減速機(jī)

深圳市東么川伺服控制技術(shù)有限公司
電話:0755-29030191
郵箱:983847136@qq.com
地址:深圳市龍華區(qū)東環(huán)一路天匯大廈D棟306房
圖文介紹步進(jìn)電機(jī)的滿步、半步、微步驅(qū)動(dòng)原理
發(fā)布時(shí)間:2020-11-16 03:25:13
步進(jìn)電機(jī)有三種驅(qū)動(dòng)模式,即滿步,半步,還有微步驅(qū)動(dòng)。
(1)滿步驅(qū)動(dòng)(Full-step)
滿步驅(qū)動(dòng),就是一次走一個(gè)步距,這是一種常用的驅(qū)動(dòng)方式。
根據(jù)通電相數(shù),滿步驅(qū)動(dòng)又分成兩種,一種是單相通電驅(qū)動(dòng),一種是雙相通電驅(qū)動(dòng)。
為簡(jiǎn)單起見,以永磁式步進(jìn)電機(jī)為例來說明,如下圖。
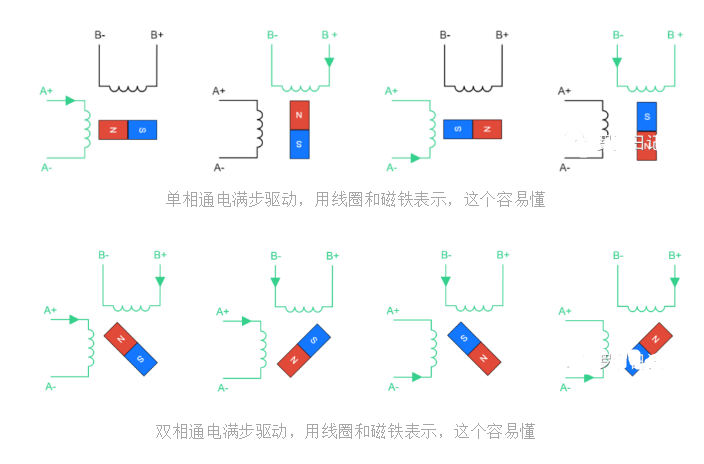
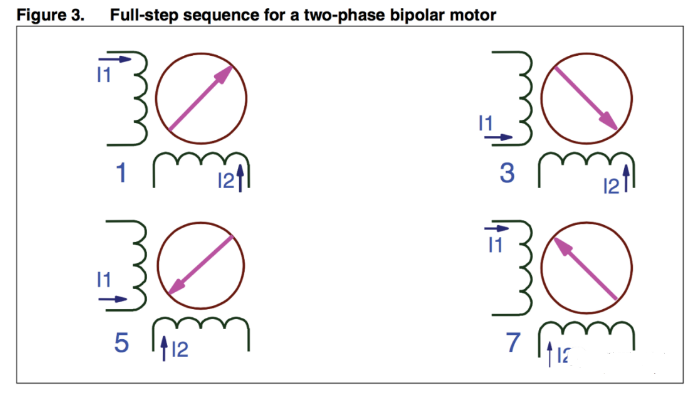
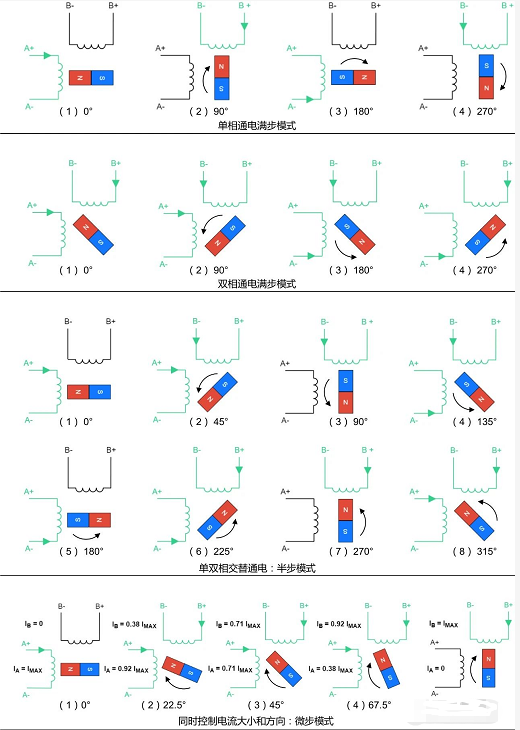
兩相滿步驅(qū)動(dòng)時(shí)的線圈通電順序,一般在產(chǎn)品目錄中,供應(yīng)商用這種表示方法。
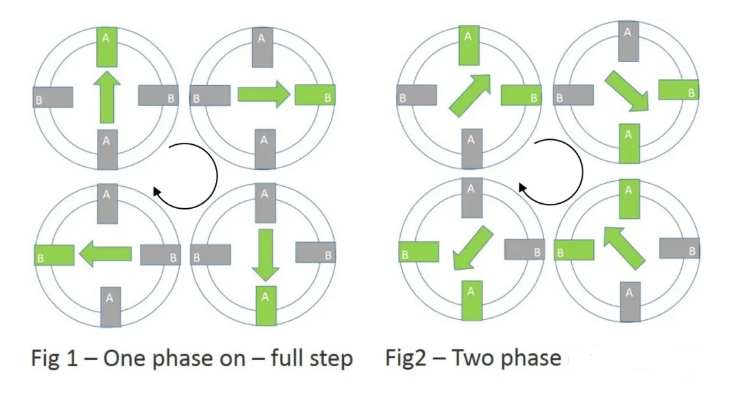
單相和雙相通電滿步驅(qū)動(dòng)概念
(2)半步驅(qū)動(dòng)(Half-step)
半步驅(qū)動(dòng),就是一次只走半個(gè)步距。
實(shí)現(xiàn)方式是單相和雙相交替通電,原理如下圖。
半步驅(qū)動(dòng)的好處是提高分辨率,但是缺點(diǎn)是扭矩只有滿步驅(qū)動(dòng)的70%,當(dāng)然,也可以通過優(yōu)化線圈中電流大小,來提高半步驅(qū)動(dòng)扭矩。
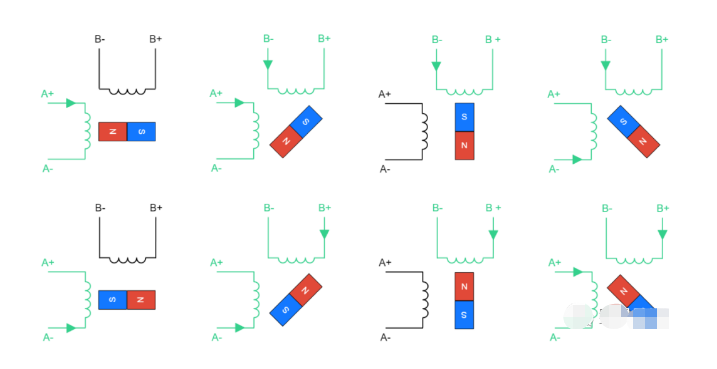
半步驅(qū)動(dòng):?jiǎn)蜗嚯p相交替通電
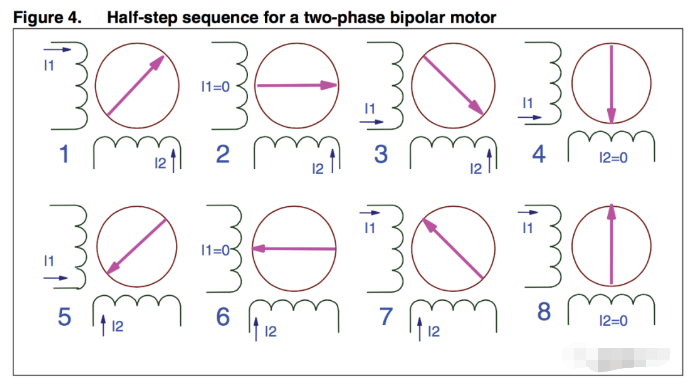
兩相電機(jī)半步驅(qū)動(dòng):?jiǎn)蜗嗪碗p相交替通電
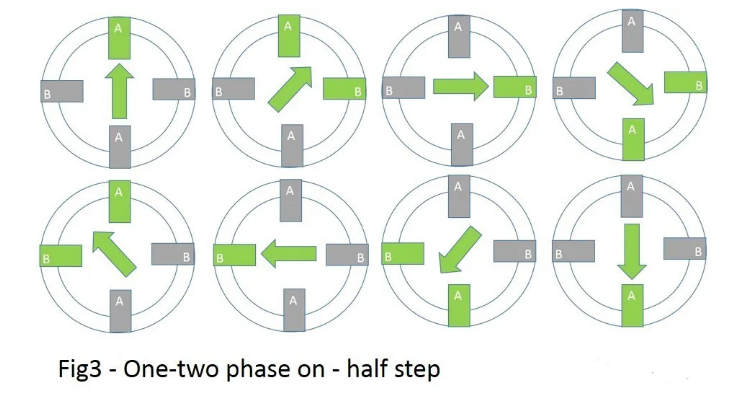
單相和雙相交替通電,實(shí)現(xiàn)半步驅(qū)動(dòng)的概念。單相通電時(shí),線圈產(chǎn)生磁場(chǎng),磁鐵因?yàn)榇艌?chǎng)的吸引力,指向通電的線圈。雙相通電時(shí),因?yàn)閮蓚€(gè)線圈都產(chǎn)生磁場(chǎng),所以合成磁場(chǎng)讓轉(zhuǎn)子處于中間平衡位置。
(3)微步驅(qū)動(dòng)(Microstepping)
因?yàn)殡娏鞔笮〔煌瑢?huì)導(dǎo)致線圈產(chǎn)生的磁場(chǎng)強(qiáng)度不同,從而導(dǎo)致轉(zhuǎn)子的平衡位置發(fā)生變化,這就是微步驅(qū)動(dòng)的原理。
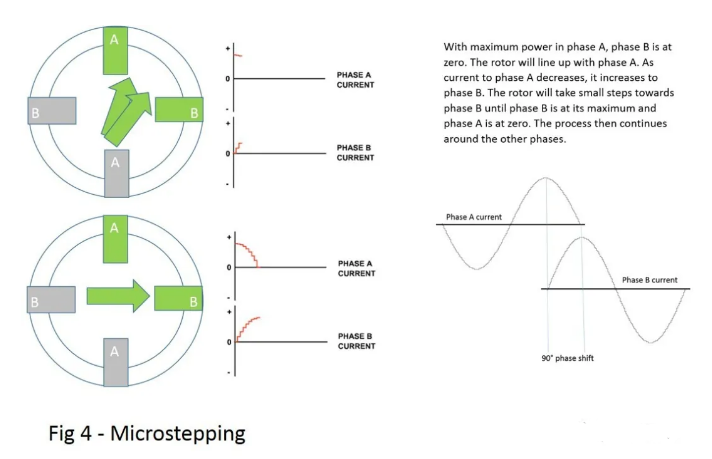
微步驅(qū)動(dòng)原理:A線圈最開始有最大電流,而B線圈此時(shí)電流為零,定子指向A線圈。A線圈慢慢減小電流, B線圈慢慢增加電流,因?yàn)榇艌?chǎng)平衡位置的變化,定子慢步向B線圈轉(zhuǎn)動(dòng)。宏觀來看,A線圈中電流變化接近Cos曲線,B線圈電流變化接近Sin曲線,直到A線圈電流減為零,而B線圈電流達(dá)到最大值,定子指向B線圈。
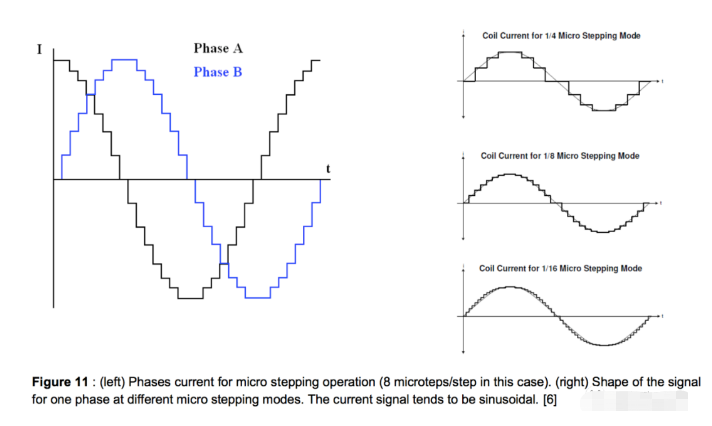
微步驅(qū)動(dòng)電流示意圖:電流每一步的變化的大小,決定了微步運(yùn)動(dòng)的大小,上圖是1/4,1/8,1/16微步電流變化示意圖
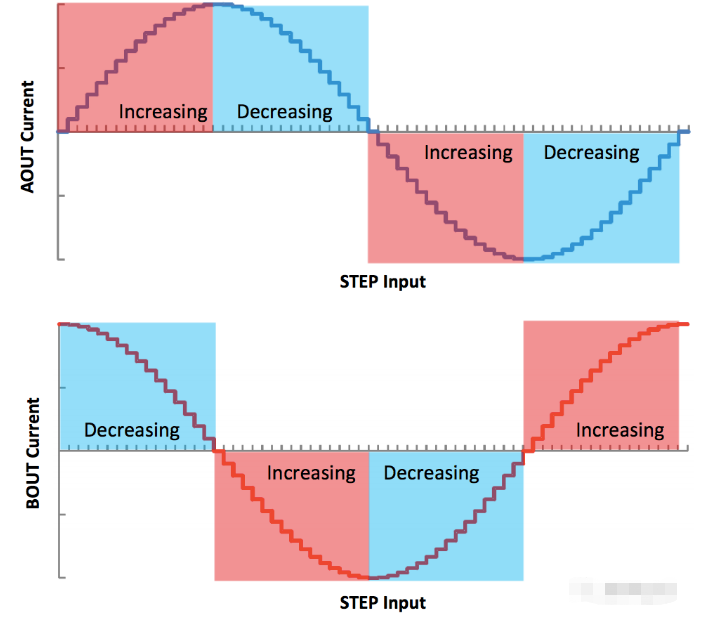
微步驅(qū)動(dòng)電流示意圖

微步運(yùn)動(dòng)舉例:在圖1中,A線圈通滿電流,圖2中A線圈通最大電流的0.92倍,而B線圈通最大電流的0.38倍,實(shí)現(xiàn)22.5°旋轉(zhuǎn)。同理,圖3中,A和B線圈同時(shí)通最大電流的0.71倍,可以實(shí)現(xiàn)45°旋轉(zhuǎn)。
比如,一個(gè)200步的步進(jìn)電機(jī),如果用滿電流驅(qū)動(dòng),那么它的步距是1.8°,而如果用一半的電流驅(qū)動(dòng),那么它的步距將會(huì)是0.9°。
當(dāng)然還可以繼續(xù)細(xì)分,一般地,步進(jìn)電機(jī)一個(gè)步距可以細(xì)分256步。
步數(shù)越多,可以獲得越平滑的運(yùn)動(dòng),噪聲也越小,不容易失步(丟步),但是代價(jià)就是扭矩大大減小。
所謂失步,就是電機(jī)沒有按照命令走相應(yīng)的步數(shù),關(guān)于失步,后一小結(jié)中,我們專門來了解。
比如,當(dāng)把一步分成16步時(shí),扭矩僅為保持扭矩的10%左右。
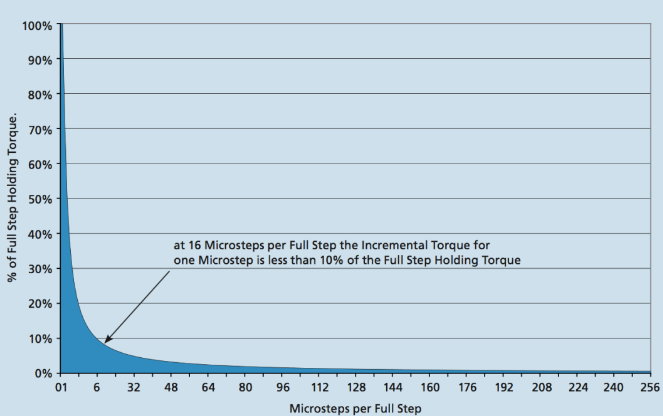
微步驅(qū)動(dòng)保持扭矩和步數(shù)的關(guān)系
設(shè)計(jì)時(shí)需要留夠余量,比如一般會(huì)考慮負(fù)載的加減速,運(yùn)動(dòng)線的拖拽力,還有步進(jìn)電機(jī)本身的制動(dòng)扭矩(Detent Torque,由于定子和轉(zhuǎn)子之間的磁力,產(chǎn)生的扭矩,一般是保持扭矩的5%-20%),摩擦扭矩等。
當(dāng)微步扭矩超過負(fù)載扭矩和摩擦扭矩及制動(dòng)扭矩之和時(shí),連續(xù)的微步才會(huì)實(shí)現(xiàn)。
有時(shí)制動(dòng)扭矩起正作用,比如當(dāng)電動(dòng)機(jī)停止時(shí),制動(dòng)轉(zhuǎn)矩可能是有益的,因?yàn)樗鼤?huì)抵消運(yùn)動(dòng)中的轉(zhuǎn)子的動(dòng)量,因此更高的制動(dòng)轉(zhuǎn)矩,將有助于電動(dòng)機(jī)更快地停止。
也就是說,在微步模式下,電機(jī)不一定會(huì)動(dòng),這就會(huì)打亂全局精度。
所以,雖然微步可以實(shí)現(xiàn)更高的分辨率,但是并不一定能帶來更好的精度。
你可能要問了,既然不一定能提高精度,那么為什么還要有微步驅(qū)動(dòng)模式呢?
其實(shí),微步驅(qū)動(dòng)的主要作用在于減小機(jī)械噪聲,減小共振,減小機(jī)械傳動(dòng)結(jié)構(gòu)的磨損,實(shí)現(xiàn)更平滑的運(yùn)動(dòng)。
有研究表明,只有當(dāng)載荷非常輕,微細(xì)步的扭矩足以驅(qū)動(dòng)負(fù)載時(shí),才可以提高精度。
實(shí)際上,把每整步細(xì)分成無限微步,就是兩相永磁交流電機(jī)的運(yùn)行原理,這個(gè)今天就不說了,日后我再開一篇日記來寫吧。
現(xiàn)在,一些生產(chǎn)廠家,生產(chǎn)微步電機(jī)的努力方向,就是以犧牲保持扭矩為代價(jià),減小制動(dòng)扭矩,使得扭矩和位置關(guān)系更接近Sin曲線,而扭矩電流曲線更趨向線性。
我感覺這里啰嗦得夠多了。
最后,關(guān)于滿步,半步,微步驅(qū)動(dòng),這里有一張小結(jié)圖。
看圖,一下就明白了,還猶豫什么,我保存了。
滿步,半步,微步驅(qū)動(dòng)示意圖
產(chǎn)品推薦:兩相步進(jìn)電機(jī)



產(chǎn)品推薦:無刷電機(jī)








產(chǎn)品推薦:兩相步進(jìn)驅(qū)動(dòng)器






產(chǎn)品推薦:直流無刷驅(qū)動(dòng)器






 地址 ADDRESS
地址 ADDRESS