新聞中心
產品中心
聯系我們

深圳市東么川伺服控制技術有限公司
電話:0755-29030191
郵箱:983847136@qq.com
地址:深圳市龍華區東環一路天匯大廈D棟306房
脈沖+方向的組成實現控制伺服電機
發布時間:2020-07-13 08:19:57
PLC系統如何控制伺服電機,首先我們說下伺服電機的模式一般有位置模式、速度模式和扭矩模式,最常用的是用于定位功能的位置模式。其中速度模式和扭矩模式可以通過模擬量輸入控制,驅動器接受速度/扭矩指令,控制電機至目標轉速/扭矩,速度和扭矩指令可由內部寄存器提供或由外部端子臺輸入電壓(-10V ~ +10V)。也就是我們可以使用PLC的DA模塊輸出電壓信號去調速和控制輸出扭矩,也可以通過通信的方式寫入驅動器內部的寄存器來完成。
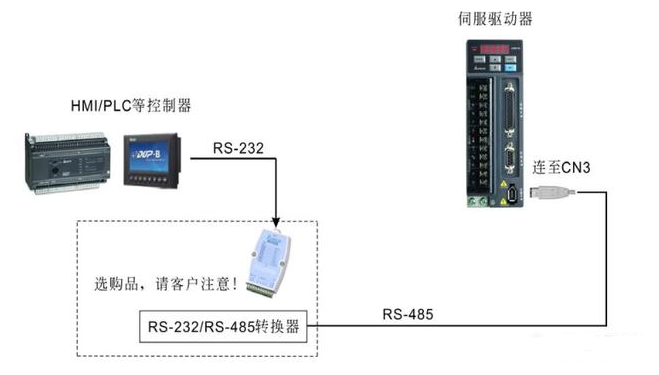
位置模式是驅動器接受位置指令,控制電機至目標位置。位置指令由端子臺輸入,信號型態為脈沖,脈沖有三種型式可以選擇,每種型式也有正/負邏輯之分,如下圖伺服系統所示的:
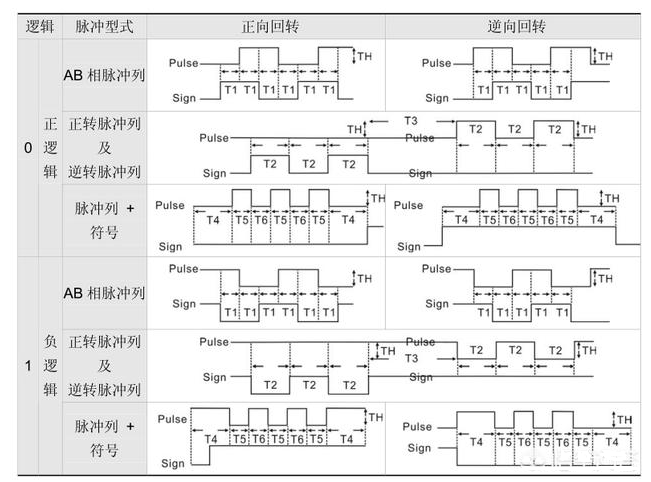
最常見簡單的方式就是脈沖+方向的組成去實現控制伺服電機。那么脈沖的發送就得靠PLC來完成了。PLC脈沖輸出一般是高速脈沖,輸出類型必須是晶體管類型的,在運動控制中有專門的定位指令來發送,很方便我們的使用,只需要選擇正確的方式即可。比如在三菱PLC中,就有基本的脈沖指令PLSY、帶加減速的PLSR,以及原點回歸、單速定位(絕對和相對位置)、可變速運行等。伺服系統定位需要設置的參數有控制模式的選擇、脈沖形式和電子齒輪比的計算,按照伺服驅動器的要求正確接線,編寫好定位程序就能控制伺服電機按照要求進行運動了。以上就是PLC系統如何控制伺服電機的內容,希望能幫到你!
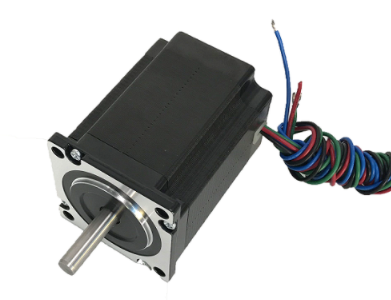
產品推薦:兩相步進電機



產品推薦:無刷電機








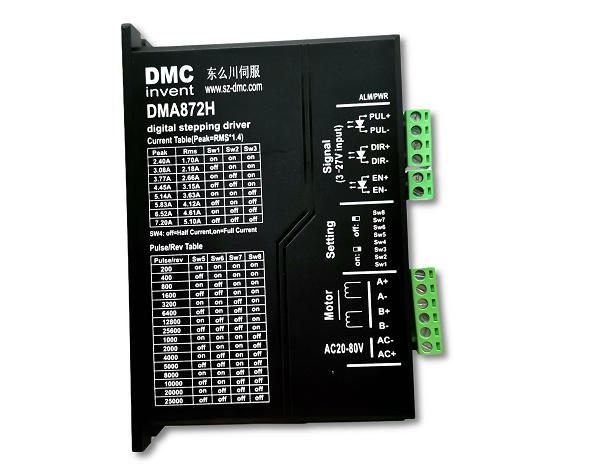
產品推薦:兩相步進驅動器






產品推薦:直流無刷驅動器






 地址 ADDRESS
地址 ADDRESS